Tutorial #3: Brains#
Spark defines a very special module called spark.nn.Brain, this module has the sole purpose of constructing and running complex models. Moreover, this is where some of the optimizations that allow Spark’s models to run extremely fast happens.
It all starts with the observation that Spiking Neural Networks are dynamical models and, a few ideas down the line, we may think of computation as flows of information. Critically, flows are not immediate, this allows us to queue every single module contained in Brain for parallel update at the expense of a slightly larger memory footprint and a small latency; most neural models already incorporate delays anyway, what is another one extra timestep more!.
Although, we expect most of the models being built through the (spoiler alert) Graph Editor utility. It may be worth to it to explain at least once how construct a Brain through code. As any other Module, Brain also expect a configuration class, which has three key components.
Module maps, which contains a description of the modules.
Input maps, which contains a description of how to map brain inputs to modules.
Output maps, which contains a description of how to module outputs to brain outputs.
Let’s start with a simple Brain that can interact with a Gym virtual environment called “CartPole”, which is a classic scenario in the RL community.
The first thing we need is a way to transform the continuous signals from the virtual environment to a spiking signal. We can use spark.nn.interfaces.TopologicalLinearSpiker which is a simple mapper that can be used to preserve some simple topological properties of the input data. Instead of instantiating the module directly, we need to create a specification of this module for the brain. This is constructed through spark.ModuleSpecs. This object expects a few inputs: a name for the module, the module we want to create, its associated configuration class and an input map.
# Imports
import spark
import jax.numpy as jnp
# Define spiker specs.
spiker_specs = spark.ModuleSpecs(
name ='spiker', # <--- Defining a module named 'spikes'
module_cls = spark.nn.interfaces.TopologicalLinearSpiker, # <--- The module is of type TopologicalLinearSpiker
config = spark.nn.interfaces.TopologicalLinearSpikerConfig( # <--- Configuration of TopologicalLinearSpiker, we politely as the
glue = jnp.array(0), # reader to accept this set of parameters as an absolute true.
mins = jnp.array(-1),
maxs = jnp.array(1),
resolution = 128,
max_freq = 200.0,
tau = 30.0,
),
inputs = { # <--- We need to specify all the inputs of the module
'signal': [ # <--- TopologicalLinearSpiker has a single input named 'signal'
spark.PortMap(origin='__call__', port='drive'), # <--- Mappings are defined through PortMap's, which are simply a pair
] # of labels, origin or name of the module producing the input and
}, # port which is the name of the output variable produced by the input
) # module
Let’s also create a simple pool of recurrent ALIF neurons and another interface that will help use transform the spikes into two continuous variables that we can use to stir the Cart.
# ALIF neurons pool.
neurons_pool_specs = spark.ModuleSpecs(
name ='neurons_pool',
module_cls = spark.nn.neurons.ALIFNeuron,
inputs = {
'in_spikes': [
spark.PortMap(origin='spiker', port='spikes'), # <--- neurons_pool attends to the output of the spiker
spark.PortMap(origin='neurons_pool', port='out_spikes'), # <--- and to itself...
]
},
config = spark.nn.neurons.ALIFNeuronConfig(
_s_units = (256,),
_s_async_spikes = True,
)
)
# Integrator.
integrator = spark.ModuleSpecs(
name ='integrator',
module_cls = spark.nn.interfaces.ExponentialIntegrator,
inputs = {
'spikes': [
spark.PortMap(origin='neurons_pool', port='out_spikes'),
]
},
config = spark.nn.interfaces.ExponentialIntegratorConfig(
num_outputs = 2,
)
)
To complete the module map we simply need to wrap everything in a dictionary.
modules_map = {
'spiker': spiker_specs,
'neurons_pool': neurons_pool_specs,
'integrator': integrator,
}
We also need to define the input and output maps. These maps tell the Brain what is expected to read and produce. This is quite straighforward although some format is still expected.
from spark import PortMap
input_map = {
'drive': spark.PortSpecs( # <--- Brain now expects a variable named 'drive'
payload_type=spark.FloatArray, # <--- with payload_type spark.FloatArray
shape=(4,), # <--- with shape (4,)
dtype=jnp.float16, # <--- with dtype float16
)
}
output_map = {
'action': { # <--- Brain now is going to produce an output named action
'input': PortMap(
origin='integrator', # <--- The output is going to be constructed from the integrator module
port='signal' # <--- Using the output named signal
),
'spec': spark.PortSpecs( # <--- The output is expected to have have this specs
payload_type=spark.FloatArray, # <--- with payload_type spark.FloatArray
shape=(2,), # <--- with shape (2,)
dtype=jnp.float16 # <--- with dtype float16
)
}
}
We are now ready to create a brain and run it!.
Note that depending on the complexity of the model this may take a little bit of time (several validation steps are required to ensure that the model will work as intended).
# Initialize the configuration class
brain_config = spark.nn.BrainConfig(input_map=input_map, output_map=output_map, modules_map=modules_map)
# Construct the brain.
brain = spark.nn.Brain(config=brain_config)
# Build the brain.
brain(drive=spark.FloatArray(jnp.zeros((4,), dtype=jnp.float16)))
{'action': FloatArray(value=Array([0., 0.], dtype=float16))}
Now we only need to setup the environment and a few utility functions. Let’s start with the utility functions.
import jax
import numpy as np
# Utility function to execute brain efficiently.
@jax.jit
def run_model(graph, state, x):
model = spark.merge(graph, state)
out = model(drive=x)
_, state = spark.split((model))
return out, state
# Utility function to retrieve data from the model.
@jax.jit
def retrieve_spikes(graph, state,):
model = spark.merge(graph, state)
spikes = model.get_spikes_from_cache()
return spikes
# Utility function to preprocess information from the environment.
def process_obs(x):
# CartPos, CartSpeed, PoleAngle, PoleAngSpeed
x = x / np.array([2.4, 2.5, 0.2095, 3.5])
x = np.clip(x, a_min=-1, a_max=1)
return x
# Reward function.
def compute_real_reward(x, x_prev, r_prev, terminated):
# CartPos, CartSpeed, PoleAngle, PoleAngSpeed
if terminated:
return 0
r = (x_prev[0]**2 - x[0]**2) + (x_prev[2]**2 - x[2]**2)
r = np.clip(0.5 * r_prev + 2 * r, a_min=-1, a_max=1)
return r
Now the virtual environment.
import gymnasium as gym
import ale_py
import numpy as np
from tqdm import tqdm
gym.register_envs(ale_py)
env_name = 'CartPole-v1'
env = gym.make(env_name)
next_obs, _ = env.reset(seed=42)
next_obs = process_obs(next_obs)
brain = spark.nn.Brain(config=brain_config)
# Build the brain.
brain(drive=spark.FloatArray(jnp.zeros((4,), dtype=jnp.float16)))
{'action': FloatArray(value=Array([0., 0.], dtype=float16))}
# Split brain into the graph and the state
graph, state = spark.split((brain))
# Some classic training loop.
reward = 0
for i in tqdm(range(2500)):
prev_obs = next_obs
# Model logic
out, state = run_model(graph, state, spark.FloatArray(jnp.array(next_obs, dtype=jnp.float16)))
# Environment logic.
next_action = int(np.argmax(out['action'].value))
next_obs, _, terminated, truncated, info = env.step(next_action)
if terminated:
next_obs, _ = env.reset()
# Flush model. Although this is not strictly necessary cartpole scenarios are quite short,
# so we pass a zero vector for a few timesteps to let the model "cooldown" a little bit.
for i in range(16):
_, state = run_model(graph, state, spark.FloatArray(jnp.zeros_like(next_obs, dtype=jnp.float16)))
next_obs = process_obs(next_obs)
reward = compute_real_reward(next_obs, prev_obs, reward, terminated)
100%|██████████| 2500/2500 [00:02<00:00, 1044.25it/s]
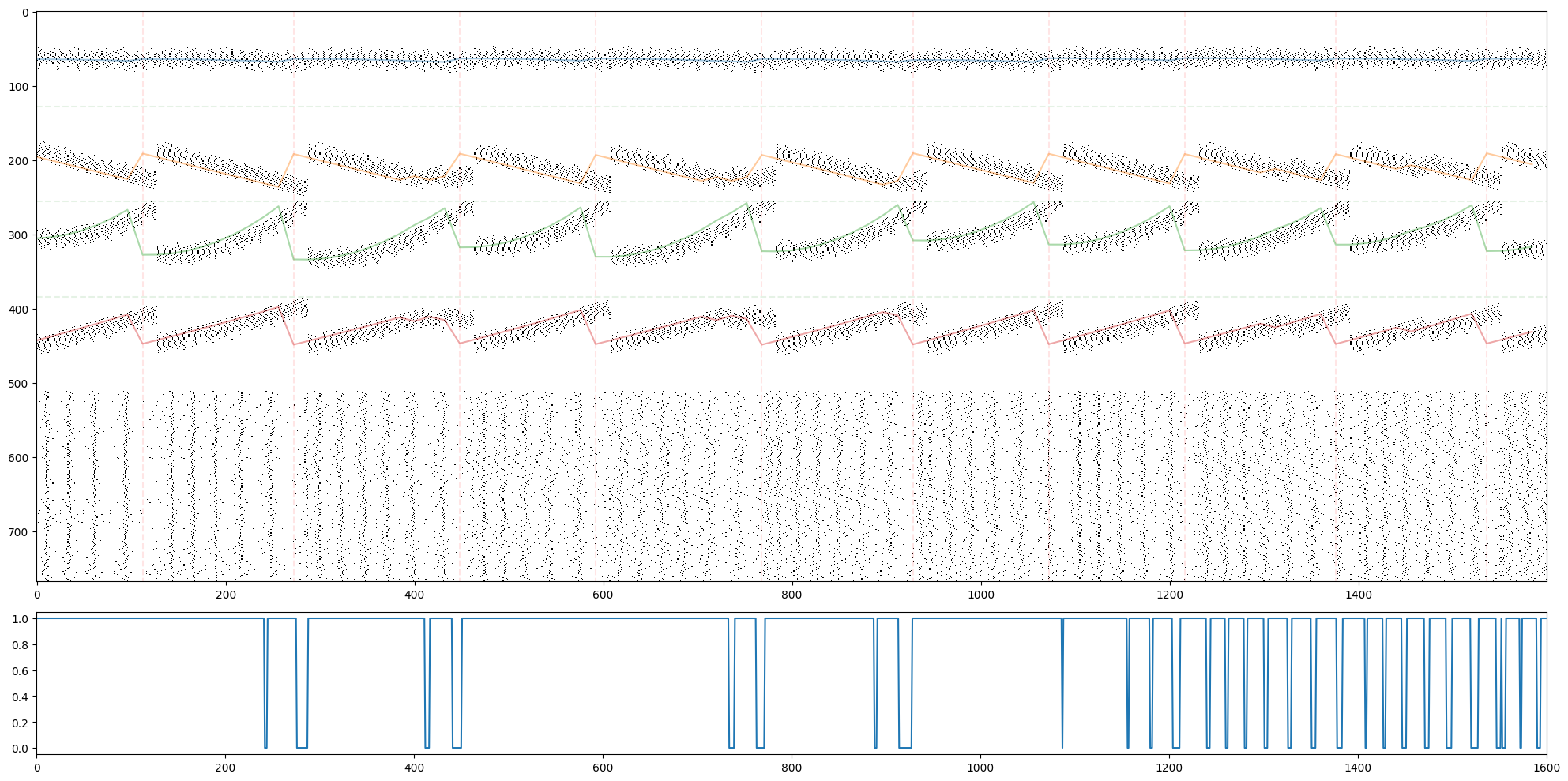
Now let’s visualize what this brain is doing!
outs = []
spikes = []
obs = []
breaks = []
break_obs = []
actions = []
reward = 0
next_obs, _ = env.reset(seed=42+1)
next_obs = process_obs(next_obs)
brain_steps_per_env_step = 16
for i in tqdm(range(100)):
prev_obs = next_obs
# Model logic
for _ in range(brain_steps_per_env_step):
out, state = run_model(graph, state, spark.FloatArray(jnp.array(next_obs, dtype=jnp.float16)))
outs.append(out['action'].value)
model_spikes = retrieve_spikes(graph, state)
spikes.append(
jnp.concatenate([
model_spikes['spiker'].value.reshape(-1),
model_spikes['neurons_pool'].value.reshape(-1),
])
)
# Environment logic.
next_action = int(np.argmax(out['action'].value))
actions.append(next_action)
next_obs, _, terminated, truncated, info = env.step(next_action)
if terminated:
break_obs.append(next_obs)
next_obs, _ = env.reset()
breaks.append(brain_steps_per_env_step*i)
# Flush model
for i in range(50):
_, state = run_model(graph, state, spark.FloatArray(jnp.zeros_like(next_obs, dtype=jnp.float16)))
next_obs = process_obs(next_obs)
reward = compute_real_reward(next_obs, prev_obs, reward, terminated)
obs.append(next_obs)
model = spark.merge(graph, state)
spikes = np.abs(np.array(spikes))
100%|██████████| 100/100 [00:00<00:00, 101.96it/s]
import matplotlib.pyplot as plt
fig, ax = plt.subplots(2,1,figsize=(20,10), height_ratios=(8,2))
ax[0].imshow(1-spikes.T, cmap='gray', aspect='auto', interpolation='none')
for b in breaks:
ax[0].plot([b,b], [0-0.5,spikes.shape[1]-0.5], 'r--', alpha=0.1)
for i in range(3):
ax[0].plot([0-0.5,len(spikes)-0.5], [128*(i+1), 128*(i+1)], 'g--', alpha=0.1)
ax[0].plot(brain_steps_per_env_step*np.arange(len(spikes)//brain_steps_per_env_step), 64*np.array(obs).T[0]+64, alpha=0.4)
ax[0].plot(brain_steps_per_env_step*np.arange(len(spikes)//brain_steps_per_env_step), 64*np.array(obs).T[1]+64+128, alpha=0.4)
ax[0].plot(brain_steps_per_env_step*np.arange(len(spikes)//brain_steps_per_env_step), 64*np.array(obs).T[2]+64+256, alpha=0.4)
ax[0].plot(brain_steps_per_env_step*np.arange(len(spikes)//brain_steps_per_env_step), 64*np.array(obs).T[3]+64+128+256, alpha=0.4)
ax[1].plot(actions)
ax[1].set_xlim(0, len(actions))
plt.tight_layout()
plt.show()